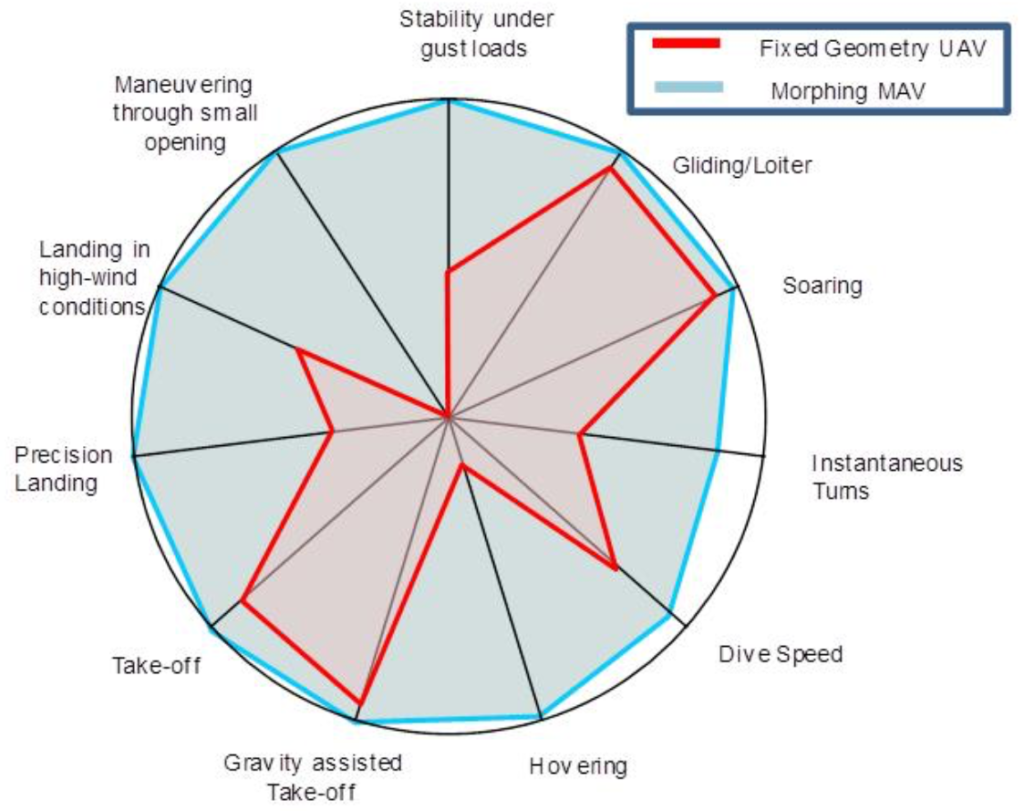
Morphing UAVs allows for improved performance over changing range of environments and objectives.
The basic idea of a morphing aircraft wherein the vehicle changes its shape (or more generally the state) to optimally perform in multiple flight segments holds the promise of achieving unprecedented levels of efficiency and enable missions which cannot currently be performed by a single aircraft. Prior morphing demonstration programs have focused on large UAVs which present two critical limitations: i) the geometry changes required for morphing compromise the wing torsional stiffness (essentially the wing ‘torque-box’ gets eliminated); and ii) the airfoil cross-section cannot be made optimal for all flight conditions. In contrast, if we look at smaller aircraft–of the order of tens of pounds or less–we can take inspiration from birds to dramatically increase efficiency and functionality. Bird wings morph in three dimensions with large changes in wing geometry (area, span, sweep, camber, articulation, inertia, thickness/chord ratios etc.) Also, bending and torsion stiffness is provided by a central skeletal structure, which is efficient at small scales. While recent work provides a solid foundation to develop bird-like UAVs (albeit with fixed wings and thrust obtained by motor-driven props), a key critical limitation is the lack of software tools for easy, rapid, and accurate evaluation of the design space and conducting trade studies which would lead to optimal designs.
The primary focus of this effort is the development, demonstration, and validation of a design framework for structurally and geometrically reconfigurable air vehicles that allows unprecedented free exploration of a wide range of morphing concepts. This approach builds on the latest developments in uncoupled fluid-structure aeroelastic analysis at Texas A&M to provide, in a fully parallelized fashion, the performance predictions for the full range of provided vehicle configurations, each performing multiple mission-related maneuvers or experiencing associated phases of flight. Unlike previous morphing approaches, all possible avian inspired motions including articulation (elbow and wrist degrees of freedom) and the resulting changes in inertia are considered. As most missions can be decomposed into some set of flight phases that are cross-applicable to other missions, multi-objective optimization over such phases serves as the underlying driver for concept selection. However, while a diverse range of vehicle configurations will be explored, adaptivity between all such states is not feasible. Background knowledge from the investigators, from biology, and the literature will allow adaptivity classification, whereby families of reconfigurations attainable via changes in relatively few configurational variables, are identified. This design space decomposition will allow intensive trades to be computed between each class, with the idealized “fully adaptable” frontier serving always as a utopian goal for the exploratory algorithms. A flowchart of the proposed computational framework is shown below.
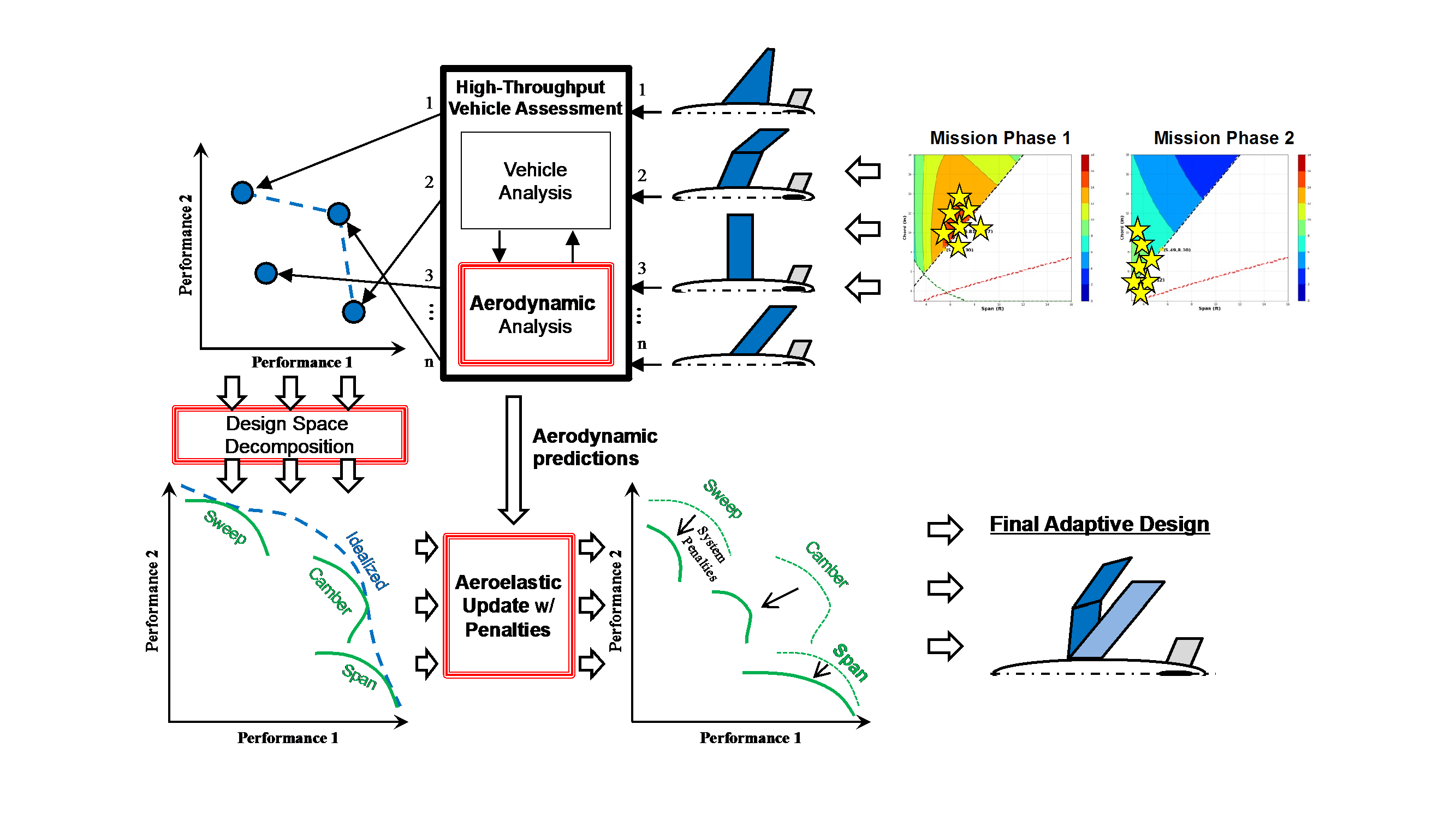
In this approach, we evaluate a series of designs for performance over a range of competing missions or mission stages. Next, the best ranges of adaptivity for each active element (sweep, camber, span, etc.) are evaluated for aerodynamic performance. Finally, aeroelastic analysis determines the true adaptive performance. In one example shown below, chord and span are evaluated for adaptive performance benefits for a small UAV flying a mission consisting of both 20 and 60 knot forward flight. In this case, active span leads to larger performance increases than active chord. However, the practical difficulties of altering chord vs span must still be considered. These tools enable better informed decisions from design engineers when considering adaptive structures.
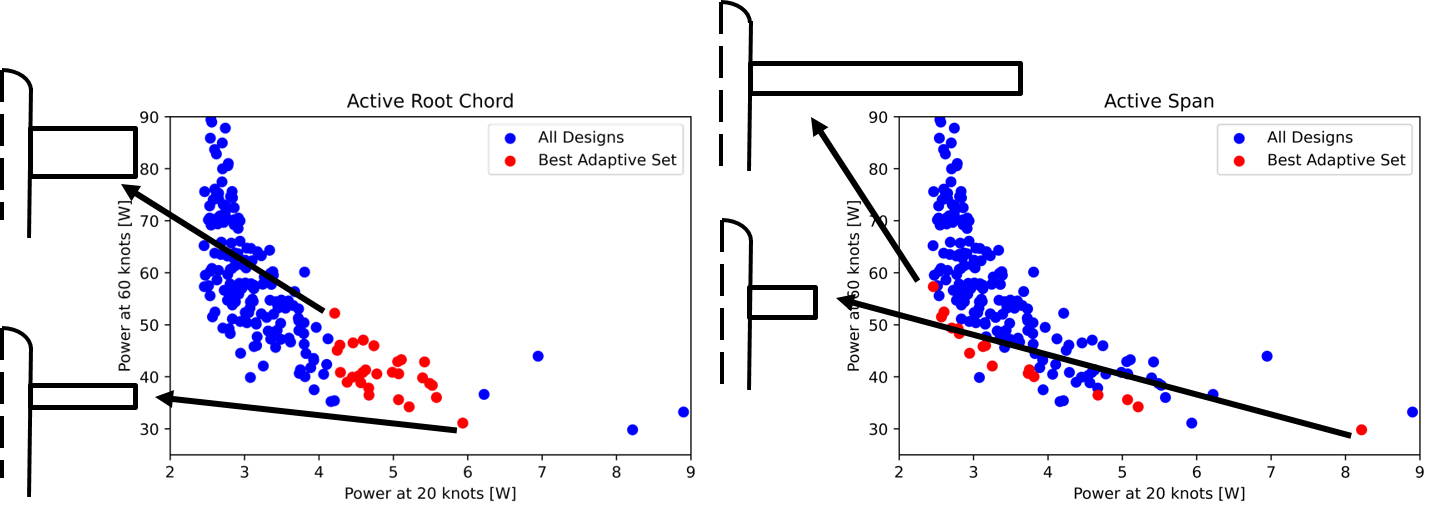
Changes in both chord and span can be compared across multiple objectives.